
Armée de Terre – A propos de la prochaine sortie du bois sur le sujet robotique

Mars attaque – publié le 8 septembre 2022
Le responsable du sujet robotique au sein du bureau Plans (en charge de l’avenir à moyen-long terme, pour résumé) de l’état-major de l’armée de Terre (EMAT) est récemment revenu sur la construction et l’intégration progressives d’une capacité robotique au sein des forces terrestres françaises.
La grande étape à venir étant la formalisation et la présentation d’ici la fin de l’année des besoins de l’armée de Terre pour de tels équipements. Etape de « sortie du bois » sur le besoin opérationnel, le fondement de toute action, après une intense phase de maturation et d’exploration, en lien notamment avec le Battle Lab Terre, et d’expérimentation, notamment avec la section exploratoire robotique (SOR) Vulcain.
Un besoin opérationnel qui ne remet pas en cause fondamentalement les grandes réflexions actuelles quant à l’avenir des forces terrestres, mais permet à la fois d’apporter un plus sur certains facteurs de supériorité opérationnels (FSO), notamment l’endurance et la masse, ouvre de nouvelles perspectives à travailler, notamment en termes de coopération, et son lot de défis (notamment pour la compréhension).
Le tout en intégrant la responsabilité éthique, avec non pas des SALA (qui ne seront pas développés pour les armées françaises), mais des SALIA (systèmes d’armes létaux intégrant de l’autonomie), comme présentés notamment dans l’avis émis par le comité d’éthique de la défense en avril 2021. CE qui conduit au fait que le commandement conservera l’appréciation de situation permettant la poursuite de mission, sera responsable de l’emploi des robots, et supervisera les fonctions critiques. Des grands principes qui demandent concrètement de s’assurer, avec les industriels, que cela est réalisable techniquement, dans les situations rencontrées en opérations.
Au final, le projet Vulcain, sur les aspects de robotique, permet d’espérer intervenir sur 2 axes forts : augmenter la profondeur tactique des effets (en distance de frappe, en capacités de renseignement, etc.), et augmente les possibilités de saturation sur l’adversaire (physique, électronique, cognitive…). Encore faut-il alors passer chacune des capacités selon le double prisme du : Qu’est-ce que je veux en faire ? L’analyse fonctionnelle. Et combien cela va me coûter ? L’analyse de la valeur. Une équipe robotisée de désignation des feux dans la profondeur peut avoir un sens tactiquement, mais peut perdre tout avantage dès lors que les contraintes et les coûts s’envolent. A quels couts permets-t-elle d’entrer dans la bulle adverse, de se prendre des coups et d’y rester ? Notamment parce que, pour le moment, une capacité robotisée coute globalement, via son empreinte RH, plus chère qu’une capacité non robotisée. D’où le besoin de laisser maturer la partie automatisation jusqu’en 2030, pour espérer faire de réelles économies, en atteignant de réelles plus-value. La charge cognitive consentie doit être acceptable, soit une notion d’efficacité forte : « si je mobilise 3 personnels sur la gestion du robot, il faut que cela apporte beaucoup ». Heureusement, « il existe des systèmes à haute VA qui sont atteignables avec une autonomie réduite ».

Ainsi, selon l’armée de Terre, dans le domaine, les forces terrestres sont à un carrefour dans le choix des effets à atteindre, et les décisions qui sont en train d’être prises conditionneront l’architecture générale qui sera retenue et sur laquelle les besoins seront travaillés conjointement avec la Direction Générale de l’Armement (DGA). Notamment quant au choix de l’architecture générale entre : unités entièrement robotisées, unités mixtes, robotique comme outil de l’arrière, robotique tactique, opérative ou stratégique, etc.
C’est dans ce cadre que le projet Vulcain est lancé, projet qui a vocation à nourrir l’expression du besoin robotique de l’armée de Terre (sans être un programme d’armement en tant que tel), pour permettre de mettre en œuvre une capacité de robotique tactique à l’horizon 2040. Pour la préparation de l’avenir, il doit orienter les travaux de préparation de l’avenir et tout particulièrement les aspects robotique du projet Titan, visant la modernisation de la composante « lourde » des forces terrestres, ainsi que la cohérence et la connectivité interarmées (et non plus uniquement interarmes). Pour sa part, le programme MGCS intègrera une robotique qui lui est propre (des ailiers autonomes, et une capacité d’agression), qui est réfléchit pour la cohérence dans l’approche Vulcain, mais qui est bien pour le coup une opération d’armement en tant que tel.
Le 1er palier s’intéressera à ce qui marche (“la technologie étant plus mure pour ce qui vole par rapport à ce qui roule“), pas cher et en qui les forces peuvent avoir entièrement confiance. La logique choisie, à priori, sera de ne pas prendre une fonction opérationnelle robotique, mais bien de raisonner robotique dans les fonctions opérationnelles existantes. En partant, à ce jour, d’un drone Niveau 0 (ou presque) de l’autonomie, puis demain, une autonomisation plus importante. Classiquement, la réflexion est faite en termes d’effets à obtenir, et ne présuppose pas du modèle de drone.
A ce jour, il n’a pas été encore comparé à grande échelle, par l’armée de Terre des unités totalement non dotées de robots et des unités mixtes ou à forte densité de robots. Néanmoins, en Janvier 2022, un 1er exercice de simulation a été mené (via les capacités de simulation notamment de la DGA) avec des unités hybrides (dotées notamment de munitions télé opérées et pouvant réaliser une défense statiques robotisée) ; il est indiqué que « de ce qui a été vu, il a été identifié de forts intérêts opérationnels, avec de bons résultats obtenus, du moins en simulation ».
Mais l’armée de Terre n’a pas encore clairement exprimé ses besoins en robotique. Jusqu’à présent, il a été vu du positif et également du négatif (cf. ici). Le vrai défi étant celui de la technologie appliquée à la réalité du terrain : l’acheminement en zone opérationnelle et la logistique afférente (MCO + énergie), l’IHM, la connectivité et l’intégration tactique, la chaine feu sécurisée, le changement de milieu, de posture et de mode d’action (passer d’un robot intégré à un convoi en rase campagne à un robot participant à du combat débarqué en pleine ville) , la prise en compte de l’environnement, la mobilité en milieu déstructuré, etc.
Un tel environnement se définissant comme :
- « Visibilité dégradée par des épisodes de fortes pluies, tempête de sable, etc. ;
- Difficulté de localisation : signal GNSS de faible qualité, voire absent, ou intentionnellement brouillé ;
- Chemins non viabilisés ;
- Obstacles divers par leur nature et leurs caractéristiques ;
- Choix des trajectoires contraint par la mission, la présence de dispositifs visant à empêcher la progression voire la présence de forces hostiles ;
- Evolution dans des zones dont les infrastructures ont été endommagées voire détruites et perturbent l’élaboration et le suivi d’une trajectoire ».
Ainsi, comme explicité, « il a fallu évacuer le fantasme, identifier le souhaitable et travailler l’accessible », et placer un double curseur :
- Quant au degré d’autonomie entre un système entièrement télé opéré (techniquement simple, car aujourd’hui la télé opération, même à grande vitesse, est techniquement accessible, avec des interfaces homme-machine à ce jour d’un bon niveau, mais qui donnent une charge cognitive élevée, avec effet tunnel liée) et un système totalement autonome (techniquement complexe mais qui donne une charge cognitive plus faible). Un domaine où il ne faut pas se laisser arrêter par une autonomie relative, car en soit ajustable, et où la valeur opérationnelle du robot est intrinsèquement liée à la synergie homme machine du système ;
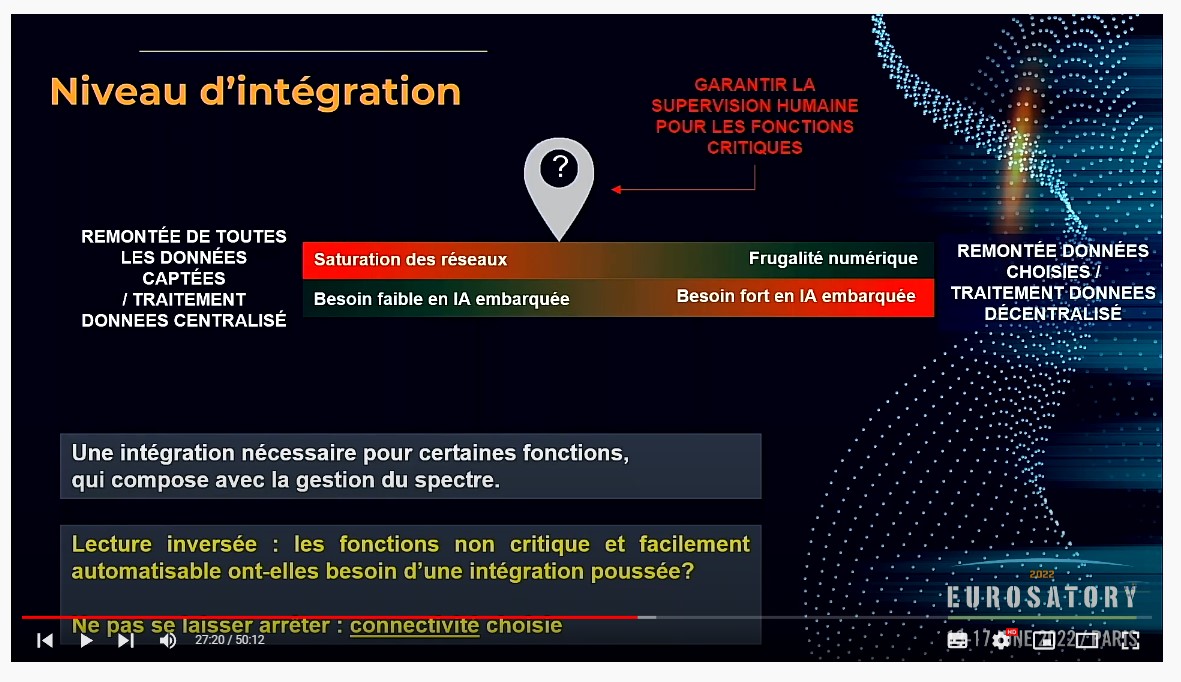
- Quant au niveau d’intégration entre un système qui remonte toutes les données captées avec un traitement de données centralisé (qui sature les réseaux mais ne nécessite pas d’IA embarqué) et un système qui remonte les données choisies et qui les traite en décentralisé (pour une frugalité numérique, mais un besoin fort en IA embarqué), tout en étant encore en mesure de garantir la supervision humaine des fonctions critiques (les fonctions non critiques pouvant elles avoir une autonomie plus forte, donc être moins intégrées, avec alors une connectivité choisie). Ainsi, des robots se débrouillent à ce jour « pas trop mal même en étant brouillés ».

Le dernier point étant la confiance, dans l’exécution et la supervision des fonctions critiques. Mais aussi « un socle de confiance technique et tactique » qui conditionne l’acceptation opérationnelle et humaine de tels systèmes. Le socle de crédibilité étant celui de la mobilité semi autonome dans le milieu, la performance et la régularité dans l’exécution de la tâche, le côté « combat compatible » (rusticité, MCO, logistique….), l’entraînement en situation réelle, et la sécurité (fonctionnement, cyber, etc.). Ces 4 points étant présentés comme « non négociables », car le but n’est pas de faire une démonstration technologique, mais bien de remplir une mission, de les intégrer dans une unité. D’où l’urgence d’atteindre un 1er socle de crédibilité. L’envoi de 4 plateformes terrestres robotisées à Gao en 2021, « avec des modules d’autonomie très légers », a été utile pour savoir comment on projette des robots et ce que cela implique. Par contre, ils sont restés à l’intérieur de la plateforme opérationnelle désert de Gao, car les militaires qui les ont reçu n’avaient pas été assez entraînés avec (ndlr : le retard dans les livraisons a obligé à changer en cours de route l’unité qui les utilisera, celle s’étant entraînée avec en France étant déployée sur le mandat précédent à l’unité finalement utilisatrice), et la confiance n’était pas suffisante pour que le chef tactique prenne le risque de les emmener sur le terrain, en patrouille.
Pour atteindre ce socle, une démarche progressive a été choisie, avec des objectifs et une déclinaison annuelle. Entre une phase initiale jusqu’en 2024 (et une primo capacité en via une plateforme polyvalente aérienne évolutive PPAE), une phase de montée en puissance (notamment avec une plateforme polyvalente terrestre évolutive PPTE), puis le changement d’échelle en 2030. Après l’unité expérimentatrice mise en place pour les réflexions « tactique robotique », les grandes étapes attendues sont :
- Des unités pilotes (encore à identifier) en 2025 dans chaque fonction opérationnelle, soit peu de temps après le 3ème incrément Scorpion (un élément important, rapport au sujet connectivité et transmissions via SICS et autres) ;
- L’arrivée de la robotique transverse en 2030, et des unités opérationnelles en 2030 ;
- Une robotique intégrée à d’autres programmes à partir de 2034-2035 (que cela soit MGCS, système anti-aérien du futur – SAAF, autant de programmes d’armement au sein du grand volet Titan).

Avec également une progression entre systèmes autonomes juxtaposées, intégrés et équipiers : des robots juxtaposés dès aujourd’hui, notamment pour reconnaissance et renseignement, demain sureté, agression et logistique, plus tard en mobilité et contre-mobilité ; puis des robots intégrées (en transmissions, reconnaissance, renseignement, etc. ; et enfin des robots équipiers post 2030.
Et des marches à passer, comme le concept d’emploi des systèmes automatisés publié en juin 2022, les études prospectives en ciblerie robotisée attendues pour octobre, l’expression du besoin des unités pilotes pour le 1er décembre 2022, les phases exploratoires comme le Probot avec 12,7 pour un poste de tir mobile jusqu’à la fin de l’année, de nouveaux drones aériens comme le Tundra d’Hexadrone (intéressant pour sa modularité), etc. Le défi Cohoma est également présenté comme particulièrement riche d’enseignements, et beaucoup est attendu de l’appel à projets Colibri et Larinae qui représenté un premier incrément dans une capacité robotisée d’agression via des systèmes bas coût de neutralisation.

Pour conclure, il est présenté un cap donné, une méthode assumée des « petits pas », et des avancées qui doivent être crédibles et démontrer de pertinence en analyse fonctionnelle comme en analyse de la valeur. En contournant, si nécessaire, les limitations techniques actuelles.